此条目需要精通或熟悉电子学 、数学 、计算机科学 的编者 参与及协助编辑。(2021年7月19日 ) 请邀请 适合的人士改善本条目 。更多的细节与详情请参见讨论页 。需要电子学专家关注的页面 。
有限冲激响应 (英语:Finite impulse response ,缩写FIR)滤波器是其冲激响应 为有限长度的滤波器 ,脉冲输入信号的响应会在有限时间内变为零,此特性和无限冲激响应 (IIR)滤波器相反,无限冲激响应滤波器存在反馈回路,其冲激响应 可能是无限长度的(不过一般会衰减)。
N阶离散时间的FIR滤波器,其冲激响应 (对应克罗内克δ函数 输入的输出)在变为零之前,最多只持续
N
+
1
{\displaystyle N+1}
FIR滤波器可以是连续时间的,也可能是离散时间的,可以是数字 的,也可能是模拟 的。
定义
直接型的N阶离散FIR滤波器。最上层是N阶的延迟线(delay line)和N + 1个抽头,每一个单元延迟是
Z变换 下的
z −1 运算子
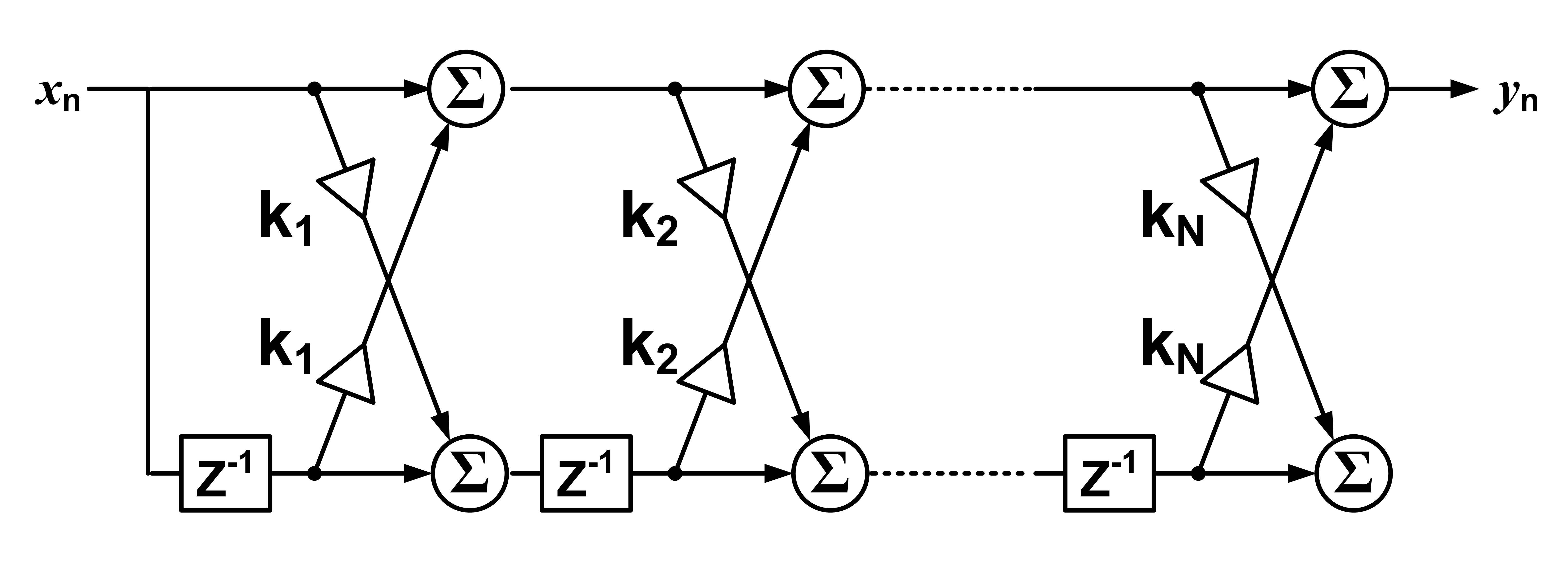
格子型的N阶离散FIR滤波器。每一个单元延迟是
Z变换 下的
z −1 运算子
针对因果
y
[
n
]
=
b
0
x
[
n
]
+
b
1
x
[
n
−
1
]
+
⋯
+
b
N
x
[
n
−
N
]
=
∑
i
=
0
N
b
i
⋅
x
[
n
−
i
]
,
{\displaystyle {\begin{aligned}y[n]&=b_{0}x[n]+b_{1}x[n-1]+\cdots +b_{N}x[n-N]\\&=\sum _{i=0}^{N}b_{i}\cdot x[n-i],\end{aligned}}}
其中
x
[
n
]
{\textstyle x[n]}
y
[
n
]
{\textstyle y[n]}
N
{\textstyle N}
N
{\textstyle N}
th 阶滤波器表示在右边有
N
+
1
{\textstyle N+1}
b
i
{\textstyle b_{i}}
N
th
{\textstyle N^{\text{th}}}
0
≤
i
≤
N
{\textstyle 0\leq i\leq N}
b
i
{\textstyle b_{i}}
计算也称为离散卷积 。
上述项中的
x
[
n
−
i
]
{\textstyle x[n-i]}
tap (抽头),依数字延迟线
滤波器的冲激响应定义为有限区间内的非零值。包括零值在内,冲激响应是无限数列:
h
[
n
]
=
∑
i
=
0
N
b
i
⋅
δ
[
n
−
i
]
=
{
b
n
0
≤
n
≤
N
0
otherwise
.
{\displaystyle h[n]=\sum _{i=0}^{N}b_{i}\cdot \delta [n-i]={\begin{cases}b_{n}&0\leq n\leq N\\0&{\text{otherwise}}.\end{cases}}}
若FIR滤波器是非因果的,其冲激响应上的非零值范围可能从
n
=
0
{\displaystyle n=0}
特性
FIR滤波器相较于IIR滤波器,有以下的优点:
不需要反馈,因此舍去误差不会因为连续的加总而累计。每一次的计算其相对误差都是一样的,因此在实现上比较简单。
在本质上稳定 ,因为其输出是有限个输入值乘以有限倍数的和,因此不会大于
∑
|
b
i
|
{\textstyle \sum |b_{i}|}
若让系数对称,可以设计成线性相位 地震学 或分音器 )中是很好的特性。 FIR滤波器的主要缺点是若要求要求低频(相对于采样率)截止频率,在相同的锐利程度或是选择性
频率响应
数列
x
[
n
]
{\displaystyle x[n]}
卷积定理 ,在频域上描述:
F
{
x
∗
h
}
⏟
Y
(
ω
)
=
F
{
x
}
⏟
X
(
ω
)
⋅
F
{
h
}
⏟
H
(
ω
)
{\displaystyle \underbrace {{\mathcal {F}}\{x*h\}} _{Y(\omega )}=\underbrace {{\mathcal {F}}\{x\}} _{X(\omega )}\cdot \underbrace {{\mathcal {F}}\{h\}} _{H(\omega )}}
y
[
n
]
=
x
[
n
]
∗
h
[
n
]
=
F
−
1
{
X
(
ω
)
⋅
H
(
ω
)
}
,
{\displaystyle y[n]=x[n]*h[n]={\mathcal {F}}^{-1}{\big \{}X(\omega )\cdot H(\omega ){\big \}},}
其中运算子
F
{\displaystyle {\mathcal {F}}}
F
−
1
{\displaystyle {\mathcal {F}}^{-1}}
H
(
ω
)
{\displaystyle H(\omega )}
频率响应 ,可以用以下的傅里叶级数 定义:
H
2
π
(
ω
)
≜
∑
n
=
−
∞
∞
h
[
n
]
⋅
(
e
i
ω
)
−
n
=
∑
n
=
0
N
b
n
⋅
(
e
i
ω
)
−
n
,
{\displaystyle H_{2\pi }(\omega )\ \triangleq \sum _{n=-\infty }^{\infty }h[n]\cdot \left({e^{i\omega }}\right)^{-n}=\sum _{n=0}^{N}b_{n}\cdot \left({e^{i\omega }}\right)^{-n},}
其中加上下标表示2π周期性。此处的
ω
{\displaystyle \omega }
正规单位
ω
=
2
π
f
,
{\displaystyle \omega =2\pi f,}
(
f
)
{\displaystyle (f)}
[A]
f
s
{\displaystyle f_{s}}
samples/second ,
ω
=
2
π
f
/
f
s
{\displaystyle \omega =2\pi f/f_{s}}
(
f
)
{\displaystyle (f)}
cycles/second (赫兹 ),周期性是
f
s
{\displaystyle f_{s}}
ω
=
π
{\displaystyle \omega =\pi }
f
=
f
s
2
{\displaystyle f={\tfrac {f_{s}}{2}}}
Hz
=
1
2
{\displaystyle ={\tfrac {1}{2}}}
cycles/sample 的频率,也就是奈奎斯特频率 。
H
2
π
(
ω
)
{\displaystyle H_{2\pi }(\omega )}
离散时间傅里叶变换 表示:
H
^
(
z
)
≜
∑
n
=
−
∞
∞
h
[
n
]
⋅
z
−
n
.
{\displaystyle {\widehat {H}}(z)\ \triangleq \sum _{n=-\infty }^{\infty }h[n]\cdot z^{-n}.}
H
2
π
(
ω
)
=
H
^
(
z
)
|
z
=
e
j
ω
=
H
^
(
e
j
ω
)
.
{\displaystyle H_{2\pi }(\omega )=\left.{\widehat {H}}(z)\,\right|_{z=e^{j\omega }}={\widehat {H}}(e^{j\omega }).}
滤波器设计
在设计有限冲激响应滤波器时,要找到符合特定规格的系数以及阶数,规格可能是时域的(匹配滤波器 ),也可能是频域的(较常见的情形)。匹配滤波器是将输入信号和已知形状的脉冲进行互相关(cross-correlation)。FIR卷积(FIR convolution)是脉冲响应的逆时间复本(time-reversed copy)和输入信号进行互相关。因此匹配滤波器的脉冲是用针对已知脉冲进行采样,再将采样信号倒序,做为滤波器的系数[1]
若希望有特定的频率响应,以下是一些常见的滤波器设计方式:
窗函数设计法
频率采样法
最小MSE(均方差)法
帕克斯-麦克莱伦算法 (也称为是等涟波法、最佳法或minimax法)常会用雷米兹算法 来找最佳等涟波的系数。使用者会标示想要的频率响应,此响应下误差的加权函数,以及滤波器阶数N。算法会找到可以将最大偏移量降到最低的
N
+
1
{\textstyle N+1}
N
+
1
{\textstyle N+1}
[2] N ,得到最佳系数的程式。等涟波FIR滤波器也可以用DFT算法设计[3] 目前已有许多软件可以进行滤波器设计,例如MATLAB 、GNU Octave 、Scilab 和SciPy 等。
移动平均滤波器的例子
简单FIR滤波器的方块器(此例中是二阶三抽头的滤波器,是移动平均滤波器)
移动平均 滤波器是简单的FIR滤波器,有时会称为Boxcar 函数 滤波器(特别在之后有降采样 的情形下)。滤波器的系数
b
0
,
…
,
b
N
{\textstyle b_{0},\ldots ,b_{N}}
b
i
=
1
N
+
1
{\displaystyle b_{i}={\frac {1}{N+1}}}
以下是更具体的例子,选择滤波器的阶数:
N
=
2
{\displaystyle N=2}
其冲激响应如下:
h
[
n
]
=
1
3
δ
[
n
]
+
1
3
δ
[
n
−
1
]
+
1
3
δ
[
n
−
2
]
{\displaystyle h[n]={\frac {1}{3}}\delta [n]+{\frac {1}{3}}\delta [n-1]+{\frac {1}{3}}\delta [n-2]}
右边的方块图是以下要讨论的二阶移动平均滤波器。其递移函数为:
H
(
z
)
=
1
3
+
1
3
z
−
1
+
1
3
z
−
2
=
1
3
z
2
+
z
+
1
z
2
.
{\displaystyle H(z)={\frac {1}{3}}+{\frac {1}{3}}z^{-1}+{\frac {1}{3}}z^{-2}={\frac {1}{3}}{\frac {z^{2}+z+1}{z^{2}}}.}
下一个图是滤波器的极零点图
z
1
=
−
1
2
+
j
3
2
{\textstyle z_{1}=-{\frac {1}{2}}+j{\frac {\sqrt {3}}{2}}}
z
2
=
−
1
2
−
j
3
2
{\textstyle z_{2}=-{\frac {1}{2}}-j{\frac {\sqrt {3}}{2}}}
若以正规化频率 ω 表示,频率响应为:
H
(
e
j
ω
)
=
1
3
+
1
3
e
−
j
ω
+
1
3
e
−
j
2
ω
=
1
3
e
−
j
ω
(
1
+
2
c
o
s
(
ω
)
)
.
{\displaystyle {\begin{aligned}H\left(e^{j\omega }\right)&={\frac {1}{3}}+{\frac {1}{3}}e^{-j\omega }+{\frac {1}{3}}e^{-j2\omega }\\&={\frac {1}{3}}e^{-j\omega }\left(1+2cos(\omega )\right).\end{aligned}}}
图上有其振幅和相位的响应,不过此图也可以用冲激响应的离散傅里叶变换 得到
因为其对称性,滤波器设计或是显示软件多半只会显示 [0, π]区域。可以看出移动平均滤波器的低频增益接近1,但会衰减高频的信号,因此是简单的低通滤波器 。相位图是线性的,但在增益降到零时出现不连续,不连续的大小是π,意思是有变号的情形。最后一张图的振幅允许正负,此时的相位就都是线性的。
参考文献
^ Oppenheim, Alan V., Willsky, Alan S., and Young, Ian T.,1983: Signals and Systems, p. 256 (Englewood Cliffs, New Jersey: Prentice-Hall, Inc.) ISBN 0-13-809731-3
^ Rabiner, Lawrence R., and Gold, Bernard, 1975: Theory and Application of Digital Signal Processing (Englewood Cliffs, New Jersey: Prentice-Hall, Inc.) ISBN 0-13-914101-4
^ A. E. Cetin, O.N. Gerek, Y. Yardimci, "Equiripple FIR filter design by the FFT algorithm," IEEE Signal Processing Magazine, pp. 60–64, March 1997.
注解
^ An exception is MATLAB, which prefers units of half-cycles/sample = cycles/2-samples , because the Nyquist frequency in those units is 1, a convenient choice for plotting software that displays the interval from 0 to the Nyquist frequency.
相关条目 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}